前言:
模切機是模切壓痕設備的統(tǒng)稱。模切包括按模板壓痕和按模板壓切�����。用鋼刀將印品壓切成單個圖形的產品稱作模切��;利用鋼線在印品上壓出痕跡或者留下彎折的槽痕稱作壓痕�。模切主要用于商標�,不干膠及電子行業(yè)。
模切機對生產速度和精度要求很高�����,目前市場上用的較多的控制架構是PLC發(fā)脈沖控制伺服或步進;本文提供另一種新穎的方法���,介紹A2伺服的PR模式用在平壓平型模切機上���。
一、 設備主要結構
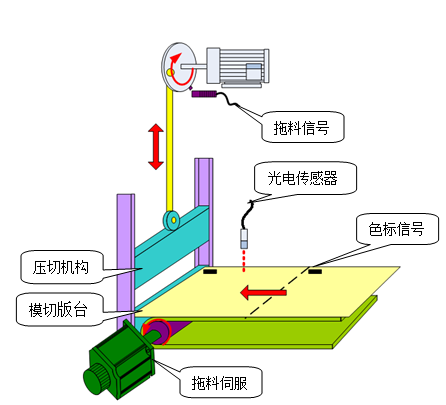
實際照片如下圖:

平壓平型模切機的模切版臺和壓切機構的形狀都是平板狀的����。模切版被固定在平整的版臺上,被加工板料放在壓板上����。工作時,模切版臺固定不動���,壓板通過曲軸連桿作用往復運動�����,使得版臺與壓板不斷地離合�。當版臺與壓板與開時��,給一拖料信號給A2伺服,A2伺服按照要求送一次料�����。之后���,版臺與壓板合壓一次,便實現(xiàn)一次模切�。
二、工藝流程
模切機的工作流程模式有程控和光控�����,光控相對復雜��。
1. 光控模式:
用在材料上有色標的場合��,要求每次切割位置相對色標是固定的�。
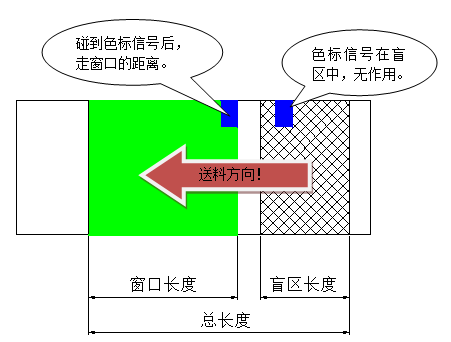
光控的過程如下(參考下圖):當A2伺服收到拖料信號后,開使進行送料����,在走的過程中,如果已送料的長度小于盲區(qū)長度的大小�����,此時,即使有色標信號����,伺服也不理會;當已送料長度大于盲區(qū)長度后��,伺服捕捉此后出現(xiàn)的第1個色標����,當碰到色標信號后,伺服以碰到色標的位置為起點�,再走窗口的距離,然后停止���。如果�����,色標信號一直不出現(xiàn)�,伺服就以一開始的速度走設定的送料長度�。
2、程控模式:
一般用在材料上沒有色標的場合���,當A2伺服收到拖料信號后���,伺
服走一固定的距離��,也就是設置的送料長度����。
三�����、功能實現(xiàn)
目前世面上大多數(shù)模切機的控制由PLC發(fā)脈沖控制步進或普通伺服�����,盲區(qū)和窗口都是由PLC判斷���,此種方式的缺點在于,當PLC碰到色標后再發(fā)指定窗口脈沖數(shù)���,即使發(fā)的窗口脈沖數(shù)是正確的���,由于伺服存在跟隨誤差��,最終的切割位置還是會有所偏離色標信號�。為避免這種情況���,一般PLC程序會做處理�����,也就是當碰到色標信號后���,先發(fā)出CCLR信號(清除脈沖誤差量)�,同時發(fā)出窗口的脈沖數(shù),這可以提高部分精度�。但由于普通伺服的I/O反應時間較長,無法達到最佳效果����。
針對此情況,我們選用臺達高性能A2伺服�����,用PR模式來實現(xiàn)。
下面簡單介紹一下 Pr 模式
所謂的Pr 模式��,即為Procedure 模式�,傳統(tǒng)的伺服,使用此模式規(guī)劃既定的行程�����,如點對點的控制�����,A2的Pr模式�����,已超出傳統(tǒng)的使用��,讓系統(tǒng)具有"可實時改變規(guī)劃行程"的能力����,具有動態(tài)調整參數(shù)的功能��,A2共有64個程序
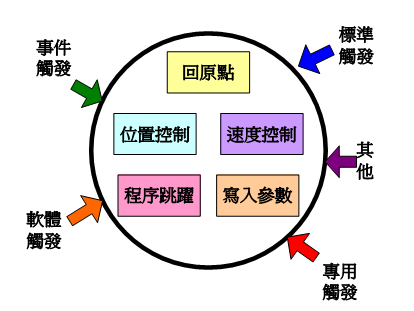
Pr 模式主要功能如上圖��,
回原點模式:提供9種回原點的模式�,若包含次選項��,組合超過30種
速度模式:可做定速控制���,含加減速曲線規(guī)劃
位置模式:定位命令,共有絕對命令�、相對命令、增量命令���、高速抓取定位命令
程序跳躍模式:可改變程序的執(zhí)行順序����,增加程序重復使用率及系統(tǒng)的使用彈性
寫入指定參數(shù):可以改變系統(tǒng)參數(shù)��,動態(tài)調整系統(tǒng)�。
四、電氣架構圖
1����、電氣配置清單:
1. PLC: DVP32ES200T*1
2. 人機界面: DOP-B05S100
3. 伺服:ASD-A2-1521-B
4. 變頻器: VFD022M21A
5. 其它電氣配件
2、電氣架構圖:
臺達的B05觸摸屏有3個通訊口�,可以同時使用,此設備��,我們用屏的COM1口(RS232)與PLC相聯(lián),屏的COM2口通過RS485和臺達A2伺服相聯(lián)�,用來設置A2運行所需的參數(shù)。這種架構簡化了用戶的配線和PLC程序量��,讓PLC專注其它重要控制���,糾偏��,收料等���。

五、A2參數(shù)設置
1�����、輸入點定義:
DI1: SON
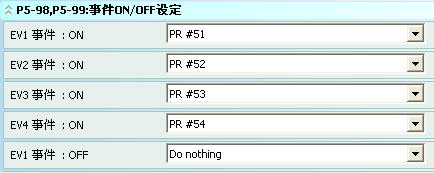
DI2: 光控 對色標切啟動 觸發(fā)EV1 (PR51)
DI3: 程控 定長切啟動 觸發(fā)EV2 (PR52)
DI4: 點動正轉 觸發(fā)EV3 (PR53)
DI5: 點動反轉 觸發(fā)EV4 (PR54)
DI6: 停止
DI7: 色標
事件功能是臺達A2伺服的一大特色�,即當輸入點發(fā)生上升(或下降)延跳變時���,觸發(fā)執(zhí)行一個PR程序���,可以用來改參數(shù),或重新歸劃路徑���。
2�����、輸出點定義
DO1:SRDY
DO2:ZSPD
DO4:盲區(qū)到達�����,100MS信號時長
3�、光控PR程式說明:
光控就是當A2伺服收到拖料信號后,首先走一個POSITION定位TYPE 2路徑PR�����,PR的長度稍大于兩個色標之間的長度��,在走的過程中�����,如果已送料的長度小于盲區(qū)長度的大小�,此時,即使有色標信號�����,伺服也不理會;當已送料長度大于盲區(qū)長度后�,伺服的CAPTURE功能開啟,捕捉此后出現(xiàn)的第1個色標���,當碰到色標信號后����,伺服中斷當前走的PR,然后再執(zhí)行一個定長PR50,PR50走的長度規(guī)劃為窗口距離��,工作模式為CAPTURE高速抓取定位����,也就是說,最終目標位置為CAPTURE抓取位置+窗口位置����,定位完成后,CAPTURE自動關閉����。如果沒有色標���,走完設定的長度后����,停止。以下是詳細的PR流程及說明:
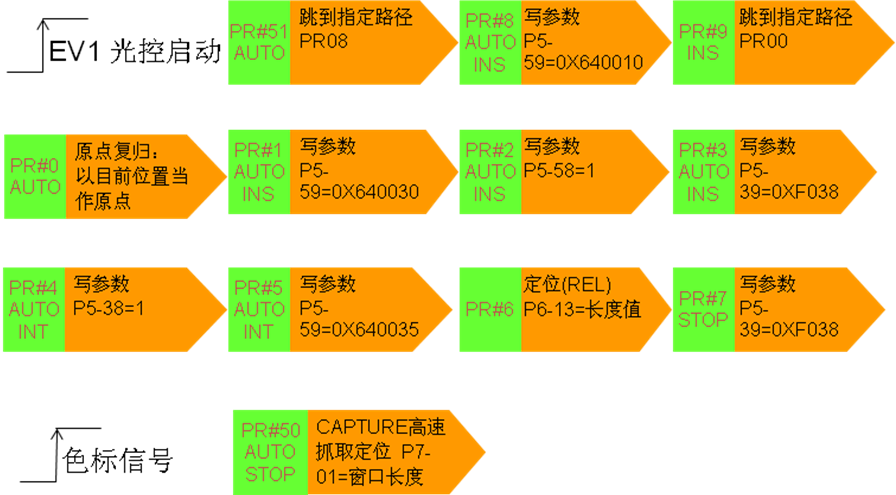
4�、光控具體PR流程及參數(shù)說明:
PR51: 當PLC發(fā)出伺服光控起動信號時,觸發(fā)伺服的事件1功能���,事件1對應的PR號為PR51,進入PR51后�����,先跳轉到PR8.
PR08: 將P5-59設為0X640010(COMPARE啟動控制)��。首先將COMPARE軸設為輔助編碼器����,目的為了后面將P5-57(COMPARE值當前位置)清零�。
PR09: 跳轉到PR0,執(zhí)行原點復歸
PR00: 回原點的方式為8����,直接定義原點以目前位置當作原點。也就是說�,伺服本身不動,只是將伺服的當前位置清零�����。然后自動跳入PR01

PR01:將P5-59設為0X640030(COMPARE啟動控制),COMPARE軸被設為主編碼器�。此時P5-57參數(shù)(COMPARE軸位置)復位為電機反饋位置,由于前面伺服已回過原點����,電機反饋位置為零,因此P5-57=0����。
PR02:將P5-58(比較點數(shù))設為1。每切一次��,只通過一個盲區(qū)��。
PR03:將P5-39設為0XF038�,定義如下圖所示。

PR04:將P5-38(CAPTURE抓取數(shù)量)設為1���。抓取盲區(qū)后出現(xiàn)的第1個色標�。
PR05:將P5-59設為0X640035(COMPARE啟動控制)�。開啟COMPARE功能,COMPARE完成后(走盲區(qū))�,啟動CAPTURE功能(抓色標)。

 PR06:啟動PR定位功能���,此時送料才開始�����。送料長度由參數(shù)P6-13設定(通過觸摸屏)����。
PR06:啟動PR定位功能���,此時送料才開始�����。送料長度由參數(shù)P6-13設定(通過觸摸屏)����。


盲區(qū)的設定:P5-56=50 (COMPARE-數(shù)據(jù)陣列開始地址)
盲區(qū)是通過屏的宏程序設進去的���。


在送料的過程中��,由于之前已啟動了COMPARE完成后啟動CAPTURE功能功能��,因此當走完盲區(qū)的距離后��,CAPTURE到色標信號后���,自動跳轉到PR50。
PR50:此PR是用來走窗口的距離����,如下圖所示


PR50路徑模式是CAP高速定位�����,如下圖�����。參數(shù)P7-01設為窗口的距離�����。(通過HMI設定)��,CAPTURE功能 的概念是利用外部的觸發(fā)信號DI7���,達到瞬間抓取運動軸的位置數(shù)據(jù),由于抓取的動作是由硬件完成�,硬件DI7響應時間 1 usec,沒有軟件延遲的問題��,對于高速運轉的運動軸也可以準確的抓取����。


PR50走完后,一個完整的PR流程就結束了,等待下一次觸發(fā)����。
PR7:如果過了盲區(qū)后,一直沒有色標信號����,此時伺服會將PR06中設定的送料長度走完�。因為CAPTURE已經開起(此刻P5-39參數(shù)為0XF039,BIT0為ON)�,為避免誤動作,還是要將CAPTURE關閉��。將P5-39設為0XF038�����,即將參數(shù)的BIT0設為OFF����。
5、程控和點動:這些功能PR程序相對簡單����,只要執(zhí)行POSITION定位功能,定位后停止即可。

拿正向點動舉例��,如下圖��,只要執(zhí)行相對定位(REL)


6�、其它參數(shù)設置
客戶的送料輥周長為600mm,由伺服經一個速比為3的減速機拖動�����,為了客戶設置方便���,我們規(guī)定1個PUU對應1um�����,也就是說送料輥轉一圈�����,伺服電機要轉3圈���,因此,電子齒輪比設置如下:

為使用比較(CMP)功能��,若來源是主編碼器,脈波設定的單位不是PUU�����,而是分周數(shù)����,必須先分清楚:
PUU:位置單位,由齒輪比(P1-44,P1-45)所定義���。
分周數(shù):每轉OA/OB輸出數(shù)量,由P1-46 所定義����。實際CMP比較的數(shù)目會乘以4。由于伺服電機轉一圈��,送料輥轉1/3圈�����,也就是走200MM���,因此���,我們將P1-46設定為50000���,CMP主編碼器(即伺服電機轉一圈)每轉會有200000個脈波,正好1個脈沖對應1個um��!
六��、PLC及HMI程序說明
此設備中�����,PLC主要用于邏輯控制��,有以下功能:
1��、 PLC控制變頻器運行���,變頻器通過外接電位器調速����。曲軸連桿在主電機帶動下作用往復運動��,使模切版臺與壓切機構不斷離合����。
2�����、 當PLC檢測到高位信號�,表明模切版臺與壓切機構是分離的���,此時允許拖料��,PLC立即接通DO點�����,觸發(fā)A2伺服DI2(光控)或DI3(程控),也就是拖料信號���。一般情況下����,拖料會在PLC檢測到低位信號前完成��,如果�����,低位信號來時,伺服拖料沒有完成��,PLC會立刻觸發(fā)伺服的DI6 STOP信號�,使伺服停止拖料,避免扯斷原材料���,同時���,在觸摸屏上顯示超速報警畫面。
3�����、 點動是用來對色標的����,每按一次,PLC觸發(fā)伺服的DI4(正向)�,或DI5(反向)走一固定短距離。
4��、 計算當前速度與產量����。
5�、 其它功能:光電糾編����,排廢,放卷等�。
6、 部分參數(shù) 設置畫面
7�����、 

8����、

七、結束語
A2是目前臺達功能強大的一款伺服�����,不光擁有快速的響應(速度環(huán)頻率達1KHZ)����,而且還提供了傳統(tǒng)伺服不具備的電子凸輪功能��,內部的PR功能,使A2能做許多原來需上位運動控制器才能完成的工作�����。
此次�,A2在模切上的成功應用表明,使用此種控制架構���,可以使客戶的PLC程序簡化�,而控制性能完全由A2伺服來保證�����,節(jié)約了客戶的開發(fā)周期��,性能也可以大大提高�。






